Research Projects
-

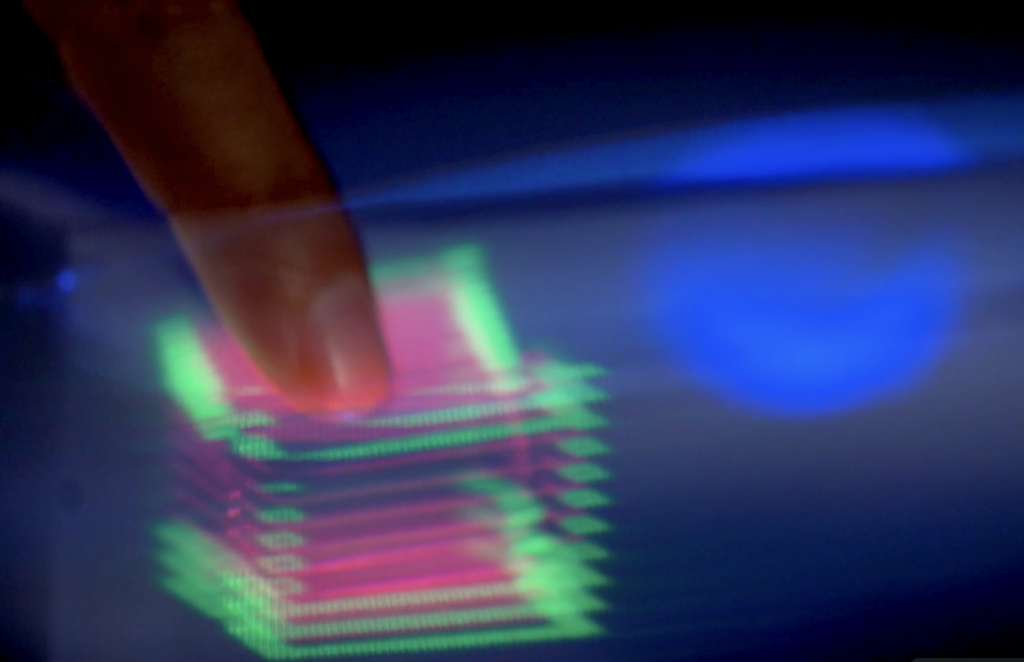
FlexiVol
A Volumetric Display with an Elastic Diffuser to Enable Reach-Through Interaction Volumetric displays render true 3D graphics without forcing users to wear headsets or glasses. However, the optical diffusers that volumetric displays employ are rigid and thus do not allow for direct interaction. FlexiVol employs elastic diffusers to allow users to reach inside the display volume to have direct interaction with true 3D content. We explored various diffuser materials in terms of visual and mechanical properties. We correct the distortions…
-
Haptixel
Enabling Object and Data Physicalization through a DIY Wearable Unit for Pressure-based Encountered-Type Fingertip Haptics The detailed presentation is also available on Youtube here; and the 2 minutes teaser as well. Virtual Reality (VR) or Augmented Reality (AR) enable the visualization and exploration of content, by augmenting a 2D rendering through a depth perception. In this paper, we investigate how to augment this depth perception by leveraging fingertips haptics. We propose Haptixel, a lightweight DIY encountered-type wearable unit, providing on-demand…
-
When Tangibles become Deformable
Studying Pseudo-Stiffness Perceptual Thresholds in a VR Grasping Task Pseudo-Haptic techniques, or visuo-haptic illusions, leverage user’s visual dominance over haptics to alter the users’ perception. As they create a discrepancy between virtual and physical interactions, these illusions are limited to a perceptual threshold. Many haptic properties have been studied using pseudo-haptic techniques, such as weight, shape or size. In this paper, we focus on estimating the perceptual thresholds for pseudo-stiffness in a virtual reality grasping task. We conducted a user…
-
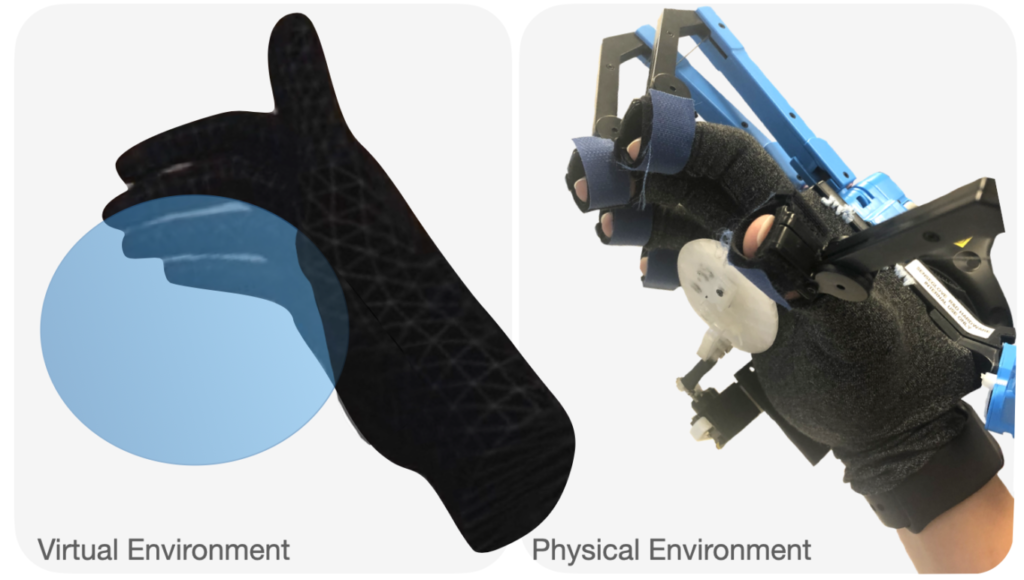
PalmEx: Adding Palmar Force-Feedback for 3D Manipulation with Haptic Exoskeleton Gloves
Haptic exoskeleton gloves are a widespread solution for providing force-feedback in Virtual Reality (VR), especially for 3D object manipulations. However, they are still lacking an important feature regarding in-hand haptic sensations: the palmar contact. In this paper, we present PalmEx, a novel approach which incorporates palmar force-feedback into exoskeleton gloves to improve the overall grasping sensations and manual haptic interactions in VR. PalmEx’s concept is demonstrated through a self-contained hardware system augmenting a hand exoskeleton with an encountered palmar contact…
-
Survey of Wearable Haptic Technologies for Navigation Guidance
Wearable haptic technologies, known as wearable haptics, instantiate physical contacts with users, either to confirm actions or to communicate a surrounding information – over a worn-type interface. Two factors require to be addressed for their design: the body locus – a function of comfort and sensitivity, and the types of stimuli they provide.Wearable haptics have gained great popularity in the last decade, thanks to their effectiveness, ease of use, and variety of application scenarios.This paper provides a non-exhaustive review of…
-
Within-Object Intention Prediction Model
We present a novel computational model to favour bare-hands interactions with haptic technologies in Virtual Realityenvironments. Using grasp taxonomies defined in the literature, we broke down users’ gestures into four key geometrical features and developed a model which dynamically predicts the users future within-object grasp intentions locations. The model supports a wide range of grasps including precision and power grasps, pulling or pushing as well as two-handed interactions. Moreover, its implementation does not require calibration (no parameter, user-independent) nor specific…
-
“Let’s Meet and Work it Out!”
Understanding and Mitigating Encountered-Type of Haptic Devices Failure Modes in VR Encountered-type of Haptic devices (ETHD) are robotic interfaces physically overlaying virtual counterparts prior to a user interaction in Virtual Reality. They theoretically reliably provide haptics in Virtual environments, yet they raise several intrinsic design challenges to properly display rich haptic feedback and interactions in VR applications. In this paper, we use a Failure Mode and Effects Analysis (FMEA) approach to identify, organise and analyse the failure modes and their…
-
“Can I Touch This?”
Survey of Virtual Reality Interactions via Haptic Solutions In the past few years, the terms “Virtual Reality” and “Haptics” have been amongst the most quoted keywords in HCI conferences. Why enabling haptics in VR? Virtual Reality experiences are evaluated in terms of presence. Presence is the feeling of being in another place than the one we are actually in. It heavily relies on the users’ senses. Currently, immersion and realism levels in terms of vision and auditory cues are really…
-
CoVR
A Large-Scale Force-Feedback Robotic Interface for Non-Deterministic Scenarios in VR CoVR is a physical column mounted on a 2D Cartesian ceiling robot to provide strong kinesthetic feedback (over 100N) in a room-scale VR arena. The column panels are interchangeable and its movements can safely reach any location in the VR arena thanks to XY displacements and trajectory generations avoiding collisions with the user. When CoVR is static, it can resist to body-scaled users’ actions, such as (A) users pushing on…
-
StretchSense
After my masters’ degree and prior to my PhD, I worked for three years at StretchSense Ltd, in Auckland, New Zealand.StretchSense is specialised in super soft, stretchable and reliable sensors, that are integrated into smart and ‘disappearable’ garments to capture all kinds of body motions. The principle is clear: because the body is mostly composed of soft (skin) and stretchable (muscles) materials, why not capturing it using a soft and stretchable material?These sensors rely on EAP (electro-active polymers), also known…